
The final piece of my Master in Computer Science is the thesis “Monocular SLAM for Context-Aware Workflow Assistance”. The abstract is included below:
In this thesis, we propose the integration of contextual workflow knowledge into a
SLAM tracking system for the purpose of procedural assistance using Augmented Reality.
Augmented Reality is an intuitive way for presenting workflow knowledge (e.g. main-
tenance or repairing) step by step but requires sophisticated models of the scene appear-
ance, the actions to perform and the spatial structure. For the latter one we propose the
integration with SLAM (Simultaneous Localization And Mapping) operating on images of
a monocular camera.
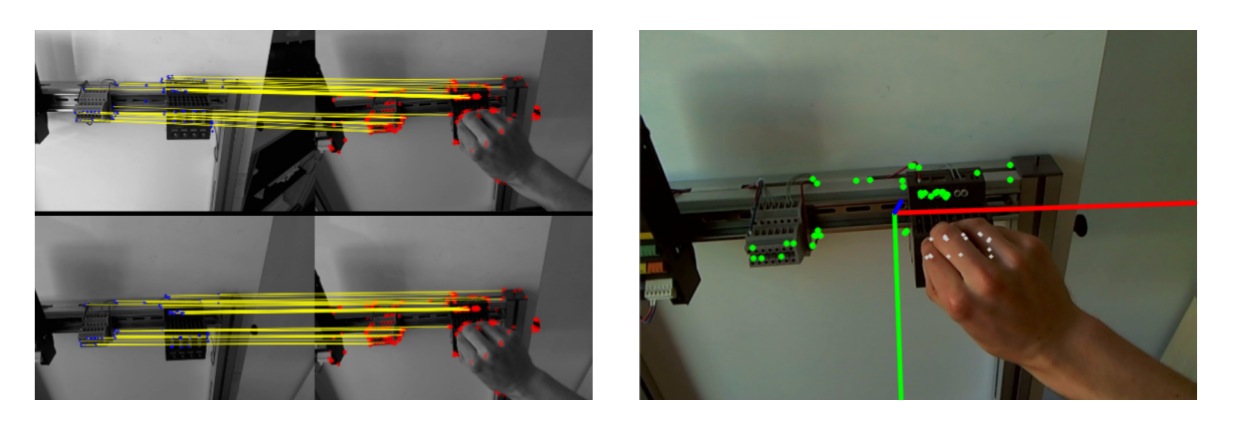
We first develop a stand-alone SLAM system with a point cloud as map representation
which is continuously extended and refined by triangulations obtained from new view
points using a three-step keyframe insertion procedure. In a second step, we integrate
contextual knowledge which is automatically obtained from reference recordings in a so-
called offline mapping step. This allows the tracking not only to cope with but actively
adapt to changes in the environment by explicitly including them in the tracking model.
To aid the data acquisition and to merge multiple tracking models into a single one, we
propose a novel method for combining offline acquired maps which is independent of the
spatial structure as opposed to ICP (Iterative Closest Point).
We show typical tracking results and evaluate the single components of our system by
measuring their performance when exposed to noise.
I wrote my thesis in Prof. Stricker’s Augmented Vision group and was supervised by Nils Petersen.
@mastersthesis{Hasper2014,
author = {Hasper, Philipp},
school = {TU Kaiserslautern},
title = {{Monocular SLAM for Context-Aware Workflow Assistance}},
type = {Masterthesis},
year = {2014}
}